Robots
This chapter introduces the robot platforms currently supported in Lumos RL Workspace.Lumos RL Workspace currently supports two humanoid robots: Lus2 and Nix1.
Both robots are described using modular configuration files and URDF/XML models, including detailed kinematics, joint limits, actuator properties, and mass distributions to ensure smooth simulation and accurate sim-to-real transfer. These resources are stored under the lumos_assets/ directory.
- Currently available models
- Lus2: Full-sized humanoid robot
- NIX1: Small-sized humanoid robot
Both robots are modeled with high-fidelity physics, including joint limits, actuator properties, and accurate mass distribution. This ensures realistic training dynamics and smoother transfer to real hardware.
Device details
Lus2
- Height: 1.6 m
- Weight: 57 kg
- Degrees of Freedom (DoF): 28
- Actuators: Position–torque actuators with compliant control
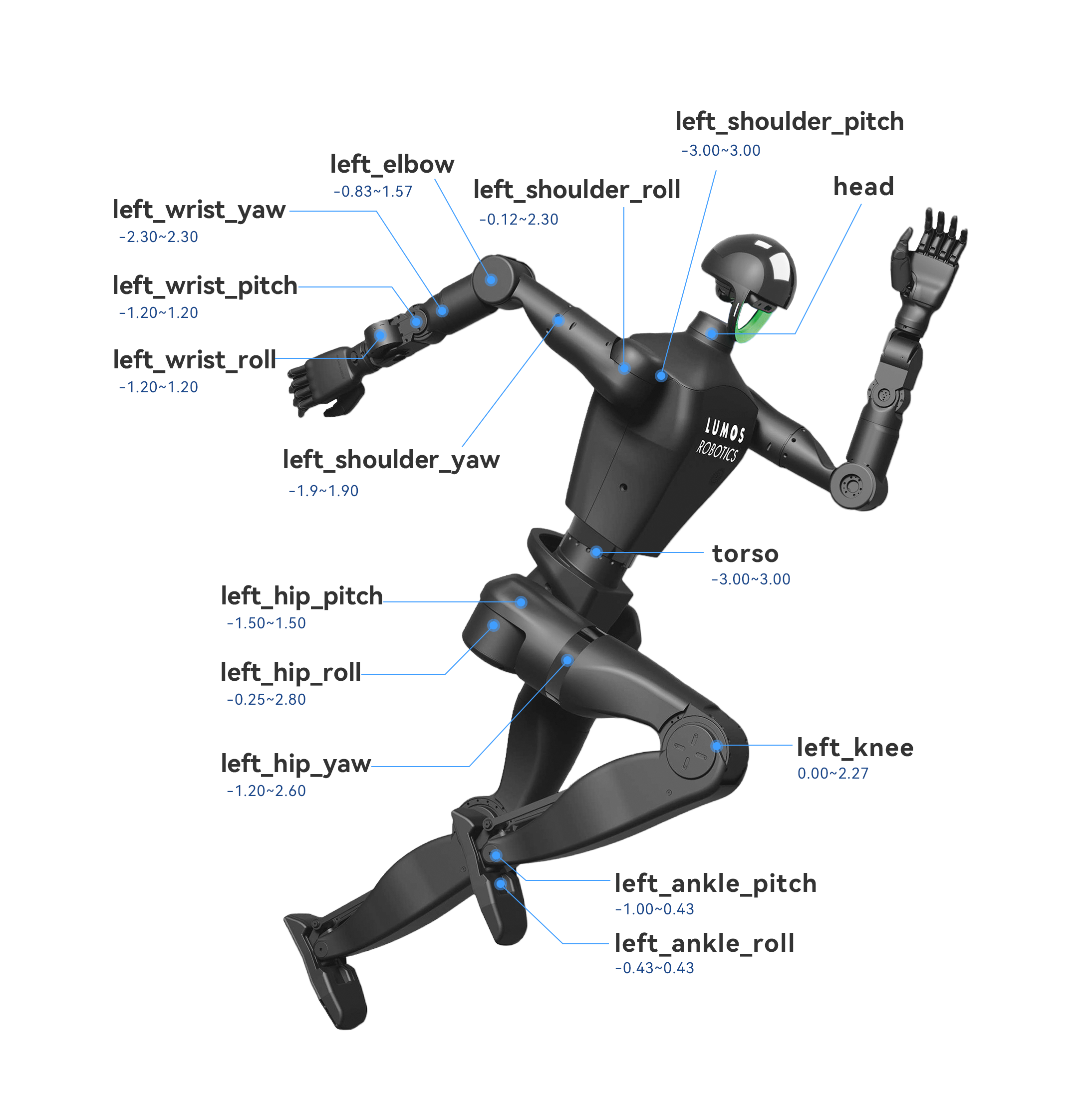
Figure : Lus2 Joint Limits (in Radians, left side example)
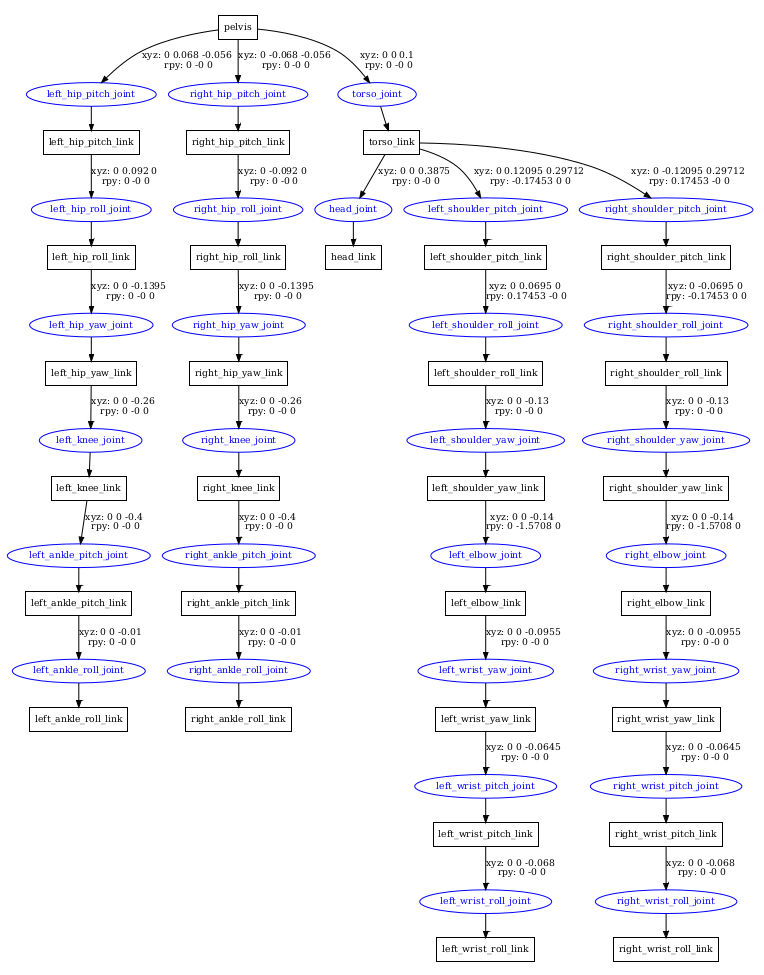
Figure : Lus2 skeleton tree
Nix1
- Height: 0.886m
- Weight: 18 kg
- Degrees of Freedom (DoF): 21
- Actuators: Hybrid position–torque actuators with higher torque limits
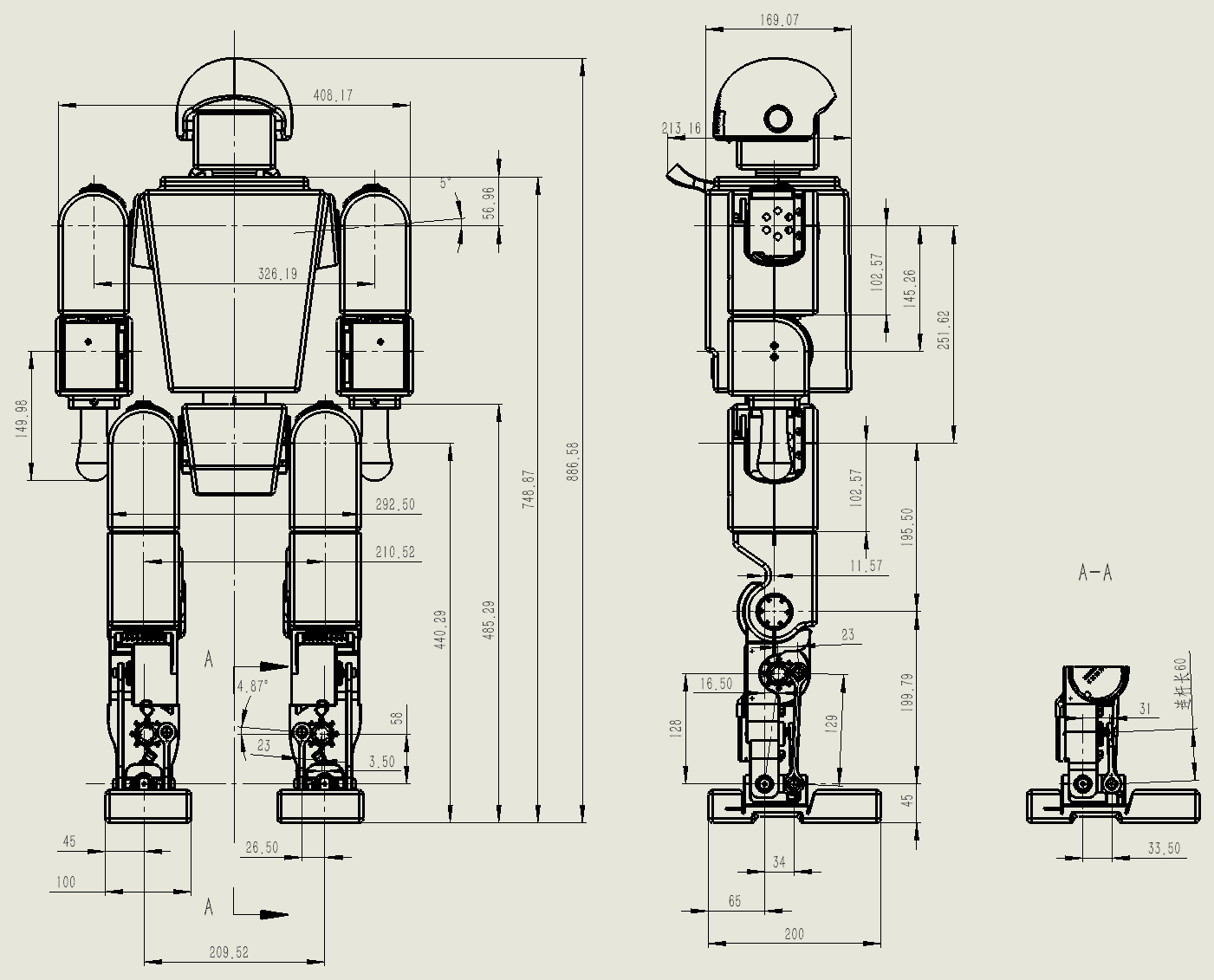
Figure : Nix1 Overall Dimension Diagram
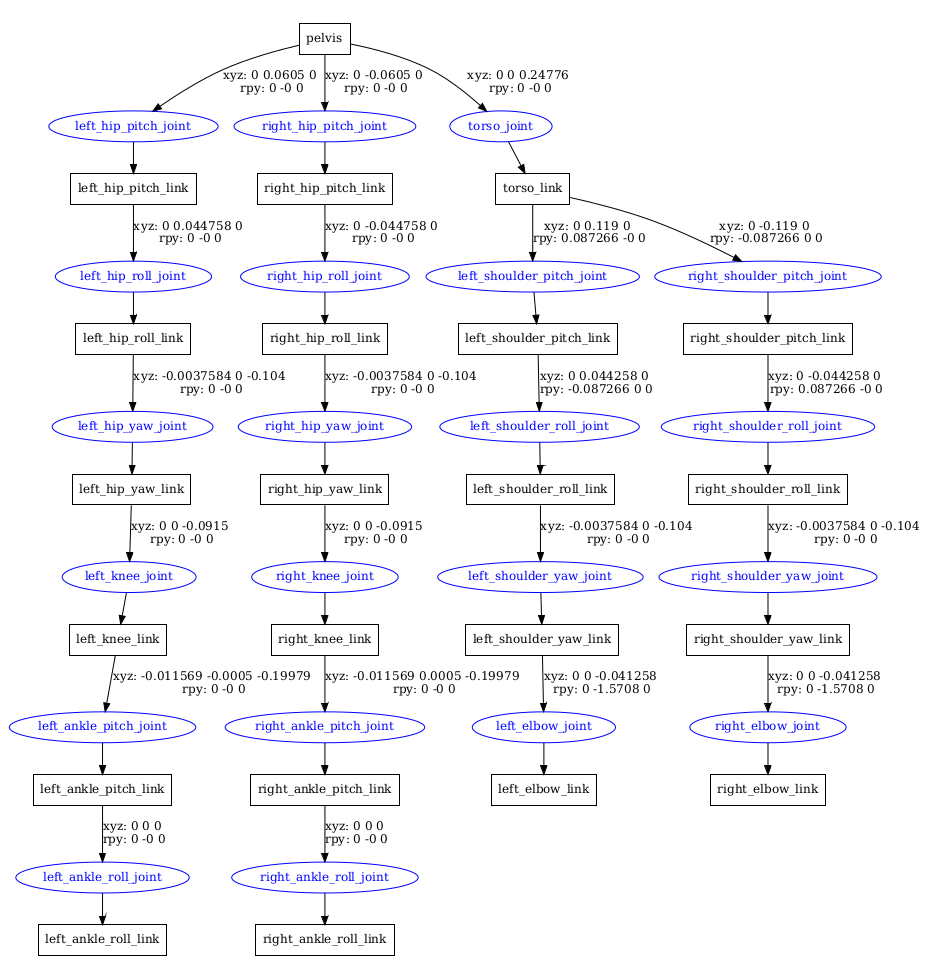
Figure : Nix1 skeleton tree